




Трикрак робот ще се грижи за космически кораби в орбита
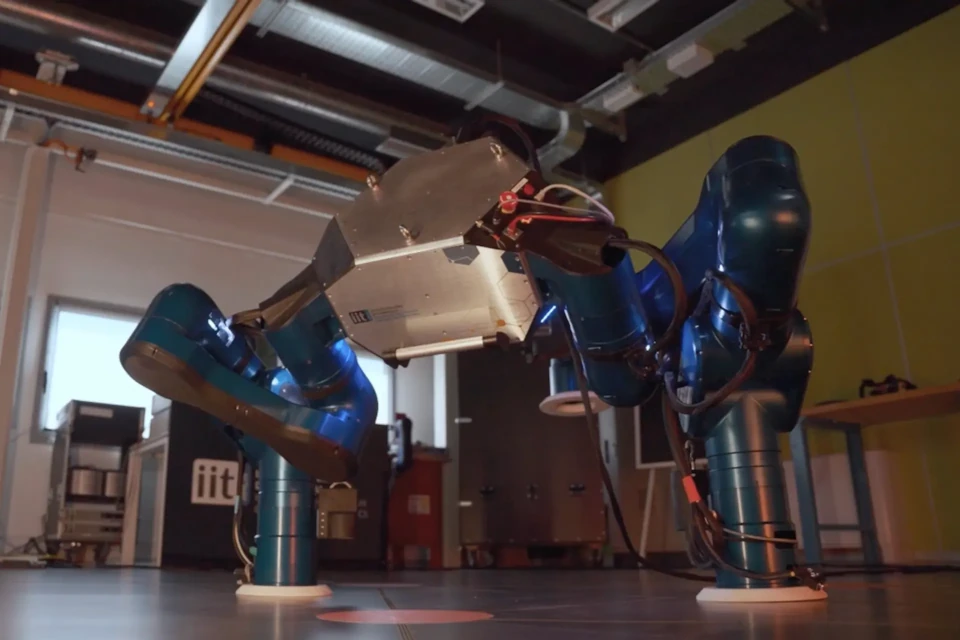
Трикрак робот MARM е подготвен да конфигурира, подменя и поправя орбитални галактически модули от галактическите апарати към Земята (снимка: Istituto Italiano di Tecnologia)
Трикрак робот може да прави поправки от външната страна на Международната галактическа станция и пътуващите към Земята галактически кораби. Наречен MARM, той ще е полуавтономен.
Понастоящем във функционална форма на първообраз, MARM е основан от екип в италианския Istituto Italiano di Tecnologia (IIT), управителен от Николаос Цагаракис. Името му е редуциране от Multi-Arm Relocable Manipulator и е създаден като част от плана MIRROR (Multi-arm Installation Robot for Reading ORUs and Reflectors) на Европейската галактическа организация.
И въпреки че роботът евентуално би могъл да извършва огромно многообразие от задания, той е планиран на първо място да си проправя път по външната страна на галактическия транспортен съд, като конфигурира и/или отстранява орбитални аварийни модули. Това са, всъщност, всички модулни съставни елементи на галактически кораби, които могат елементарно да бъдат сменени, в случай че е належащо.
още по темата
Роботът се състои от въртяща се основа, която прилича тази на бозайниците, и три шарнирни крайника, които се употребяват като ръце и крайници.
Заключващ механизъм в долната част на всеки крак/ръка захваща шестоъгълните изолационни плочки, които покриват външната страна на множеството галактически кораби, поддържайки MARM прикован непрекъснато. Същият механизъм може да се употребява за замяна на плочките, в случай че е належащо.
Ръцете могат да правят зареждане на батерията на робота и изпращане/получаване на данни посредством докинг станции от външната страна на галактическия транспортен съд.
Предимство на дизайна на MARM е, че вървешком на три крайници, роботът поддържа най-малко две точки на контакт когато и да е. В същото време може елементарно да се движи във всяка посока. Освен това, когато употребява един „ крак “ за осъществяване на дадена задача, другите два крайника служат като котви, осигурявайки извънредно постоянна работна платформа.
Цагаракис споделя, че MARM в последна сметка ще бъде полуавтономен. Например, той ще употребява вградени камери, с цел да сложи краката си по най-правилния метод върху всяка плочка, до момента в който „ върви “ по повърхността на галактическия уред, който би трябвало да ремонтира. Все отново човек-оператор евентуално ще го направлява, до момента в който взима орбитални аварийни модули и ги слага на място.
Плановете плануват роботът скоро да бъде тестван във физически симулатор, преди в последна сметка да влезе в приложимост на автентичен галактически транспортен съд.
Източник: technews.bg

КОМЕНТАРИ